
Dynamisch stabile Lokomotion mehrbeiniger Roboter mit parallelkinematischen Strukturen
Stand der Technik/Motivation
Parallelmanipulatoren weisen gegenüber seriellen Manipulatoren im Allgemeinen eine erhöhte Steifigkeit, Dynamik und Führungspräzision auf, besitzen jedoch im Gegenzug einen kleineren Arbeitsraum. Basierend auf der bekannten Kinematik des sphärischen Parallelmanipulators soll ein möglichst kompakter und leichter Mechanismus entwickelt werden, der jedoch weiterhin trotz reduzierter Größe der tragenden Verbindungsstrukturen belastbar bleibt. Der resultierende kompakte, mechanisch robuste und hoch dynamische sphärische Manipulator soll daraufhin auf die Anwendbarkeit und Eignung als Hüftgelenk in Laufrobotern untersucht und weiterentwickelt werden, da es in diesem Zusammenhang nur wenig existierende Untersuchungen gibt. Zudem wird die Entwicklung eines leichtgewichtigen mehrbeinigen und agilen Prototypenroboters unter Verwendung des modifizierten sphärischen Manipulators angestrebt.
Methoden/Vorgehen
Die Entwicklung des einzelnen Mechanismus bis zum vollständigen Prototyp eines Laufroboters wird iterativ in einzelnen Schritten durchgeführt. Zunächst wird der Einzelmechanismus konzeptionell entworfen und einer kinematischen Analyse unterzogen. Ausgehend von der angestrebten Kinematik wird ein CAD-Modell entworfen, das zu großen Teiles mittels 3D-Druckverfahren als leichtgewichtiger Kunststoff-/Aluminiumverbund gestaltet wird. Ein Regler wird auf Grundlage einer Simulation des Modells entworfen und anschließend mittels echtzeitfähiger dSpace-Hardware auf das reale Prototypenmodell angewendet. Nachdem die Umsetzbarkeit eines einzelnen Gelenks verifiziert ist, soll ein vollständiges Modell eines mehrbeinigen Laufroboters in Simulationen hinsichtlich der geometrischen Auslegung optimiert, getestet, ein Regler entworfen und anschließend als realer Prototyp konstruiert werden.
Forschungsergebnisse
Software-Framework
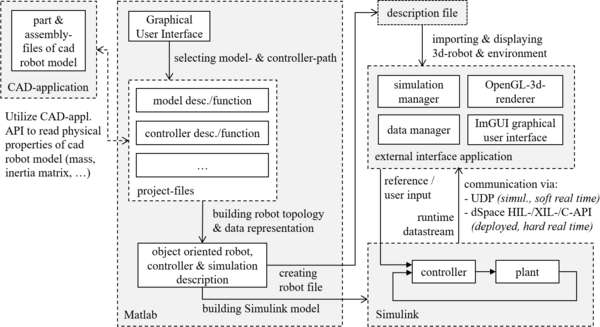
Es wurde ein Softwareframework erstellt, das zur Automatisierung verschiedener Vorgänge genutzt wird, um Design und Entwicklung des Roboterprototypen zu beschleunigen und zu generalisieren. Die Notwendigkeit zur Entwicklung eines solchen generellen Frameworks ergibt sich aus den Limitationen existierender Softwarelösungen, die nur in begrenztem Umfang geeignet für das angestrebte Vorhaben sind. Das Software-Framework bildet die Grundlage für alle durchgeführten Simulationen, ermöglicht iteratives Entwickeln und schnelles Testen von Anpassungen und bietet eine direkte Anbindung an einen realen Prototypenroboter. Es fungiert als Schnittstelle zwischen Simulation, Regelung, CAD-Anwendung, Benutzerinteraktion und Deployment von Code auf reale Echtzeithardware.
Simulationen & Prototypen
Ein Prototypmodell eines sphärischen Parallelmanipulator wurde als CAD-Modell entworfen und als Aluminium-/Kunststoffkonstruktion gefertigt. Durch die Nutzung eines stereolithografischen 3D-Druckverfahres können hochgenaue und komplexe Formen gestaltet werden, die einen räumlich kompakten Manipulator ermöglichen. Für die Einbringung von Drehmomenten werden zu Testzwecken Dynamixel-Aktuatoren verwendet, die zu einem späteren Zeitpunkt gegen spezialisierte und leistungsfähigere Aktuatoren ausgetauscht werden. Die Regelung erfolgt zu Testzwecken mittels kaskadierter PID-Regelstrecke auf Grundlage der Berechnung der inversen Kinematik des Manipulators in Simulation und in der realen Prototypenausführung.